COMUNICACION
SERIAL INALAMBRICA
Diego J Viveros
Laboratorio Circuitos
Digitales I
Profesor: Víctor Mondragón
PROGRAMA
DE INGENIERÍA
UNIVERSIDAD DEL CAUCA,
POPAYÁN
– COLOMBIA
Fecha: Martes 15 de Junio de 2004
RESUMEN
Se diseño e implemento un
sistema de adquisición de datos serial e inalámbrico, el cual convierte una
señal analógica en digital con una resolución de 10 bits y envía el resultado de la conversión, usando
el protocolo RS-232 y mediante RF, a un PC para ser visualizada..
INTRODUCCIÓN
En múltiples ocasiones
en las que se desea monitorear sistemas
físicos se hace necesario o quizá deseable, prescindir del cableado, debido a
los inconvenientes que este ocasiona bien sea por el tiempo excesivo de instalación,
coste de mantenimiento o debido a que las distancias entre el sitio de la
planta y el de monitoreo son muy largas.
Una alternativa es la comunicación por radiofrecuencia, en este caso las
señales viajaran usando como canal el aire y de esta forma soluciona muchos de
los inconvenientes que presenta un monitoreo cableado.
MARCO TEÓRICO
La comunicación inalámbrica y la modulación de señales:
En toda comunicación se necesita un emisor,
un receptor y unos mecanismos o sistemas de emisión-recepción. Por ejemplo las señales de TV se graban con una cámara en
unos estudios, mediante sistemas electrónicos se convierte a señales de
radiofrecuencia que se propagan en el espacio a la velocidad de la luz, y se
envía mediante una antena al espacio. Posteriormente esta señal se recogerá por
otra antena en el receptor y se invertirá el proceso. El problema que podría
darse es que cuando se mandan muchas señales interfíeran unas con otras por eso se creó un sistema que soluciona este problema. A este sistema se le llama
"MODULACIÓN".
La
modulación consiste básicamente en añadir a una señal llamada
"portadora" la señal inicial.
La modulación se puede hacer de dos formas en amplitud A.M. o en frecuencia
F.M.
La
modulación en amplitud A.M. consiste en modificar la amplitud de la portadora
en función de la señal a transmitir como se muestra en la figura 1.
FiGURA 1. Modulación en AM
En la modulación en F.M. lo que se hace es variar la
frecuencia de la portadora en función de la señal transmitida como se muestra
en la figura 2. .
Figura 2. Modulación en FM.
En cuanto a los tipos de modulación, la modulación
A. M. se ve afectada mucho mas por el ruido que la F. M.
Como ya se mencionó
la señal después de modulada se radia al medio a través de la antena.
Esta señal se trasmite por cualquier medio disponible es decir aire y tierra
pero las señales de tierra están muy amortiguadas. Eso hace que resulte mejor
concentrarse solo en la que se transmite por el aire. Se necesita una antena para recibir la señal la cual se
debe adaptar a la frecuencia y características de la señal a recibir.
Esta antena se debe colocar además a una altura
determinada. Esto es a causa de que las señales de alta frecuencia se propagan
en línea recta y por lo tanto debido a la curvatura de la tierra estas señales
solo se pueden captar desde ciertos lugares.
CANALES:
la señal de T.V. se transmite en
canales ya que una señal de T.V. lleva
señales de audio, vídeo, croma, etc. que ocupan unas frecuencias determinadas.
Para evitar que haya problemas de interferencias estas señales se reparten en
canales entre los 40 MHz y 860 MHz
BANDAS: A su vez estos canales se agrupan según el
nivel de frecuencia por grupos denominados bandas.
Por lo tanto se podría distribuir en cualquier canal
o margen de frecuencias pero luego en la realidad se ve que al recibir la señal
interfieren unos canales en otros. Por esto hay que tener en cuenta que el
ancho del canal es de 7MHz y 8MHz para UHF.
Esta anchura del canal y la distribución de las portadoras dentro del
mismo obliga a que se dejen 1 canal de separación
en VHF y 2 canales para UHF porque a altas frecuencias se complica la cosa.
ANTENA: Es el elemento final en toda
telecomunicación de radiofrecuencia. Se puede utilizar tanto para emitir como
para recibir.
PIC 16F873:
Este microcontrolador de la familia 16F87X de
microchip, posee tres puertos de entrada y salida, se muestra en la figura 3.
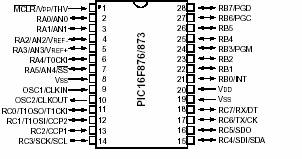
FIGURA 3. Pic16F873.
Tales puertos
pueden ser programados como entradas ó bien como salidas digitales, en el caso
del puerto A también puede ser programado como de entradas analógicas,
dependiendo de la aplicación. En este caso por ejemplo es importante resaltar
que este microcontrolador cuenta entre sus periféricos con un modulo llamado
USART, el cual mediante la modificación de unos pocos registros se encarga de
la comunicación serial entre el micro y otro dispositivos y también posee un
conversor A/D de 10 bits de resolución con hasta 6 canales de entrada. El
funcionamiento del microcontrolador se programa con ayuda de un código que
después es compilado y posteriormente quemado en la memoria de programa del
micro.
La comunicación serial y el protocolo RS-232:
Desde hace mucho tiempo es norma que los computadores tengan un puerto serial también conocido como RS-232 que les permite comunicarse entre PC`s y también con otros periféricos tales como mouses y entre otros los microcontroladores.
Existen dos formas de intercambiar información binaria: la serial y la paralela. La comunicación paralela transmite todos los bits de un dato simultáneamente y por supuesto es muy rápida aunque presente la desventaja de un mayor coste, debido a una mayor necesidad de cable entre otros sumado también a que se dificulta en distancias largas.
Por su parte la comunicación serial transmite un dato a la vez, claro es más lenta, pero posee la ventaja de necesitar un menor numero de líneas para la transferencia de la información y alas distancias a las cuales se puede realizar el intercambio son mucho mayores.
Existen dos formas de comunicación serial la sincronía y la asíncrona. En la comunicación sincronía además de una línea sobre la que se transfieren datos se necesita otra que contenga pulsos de reloj que indiquen cuando un dato es valido; la duración del bit esta determinada por la duración del pulso de sincronismo. En la comunicación asíncrona, los pulsos de reloj no son necesarios y se acude a otros mecanismos para realizar la lectura y/o escritura de los datos; la duración de cada bit esta determinada por la velocidad con la que se realiza el intercambio de los datos.
Normalmente cuando no se realiza ningún intercambio de datos, la línea del transmisor es pasiva y se encuentra en un estado alto, para empezar a transmitir un dato, el transmisor coloca en bajo esta línea durante el tiempo de un BIT, esto se conoce como BIT de arranque y enseguida empieza a transmitir el dato con el mismo intervalo de tiempo de los bits correspondientes al dato, comenzando con el LSB y terminando con el MSB. Al terminar se agrega si se desea un BIT de paridad y se incluyen uno o dos bits de parada, ahora la línea se encuentra nuevamente en estado alto.
El receptor no esta sincronizado con el transmisor y será la transición de alto a bajo en la línea del receptor la que le indique que el momento de empezar a transmitir ha llegado.
En los años 60`s se publico una norma que ha alcanzado una gran popularidad conocida como la norma RS-232. esta norma define la interfaz mecánica, las características, los pines, las señales y los protocolos que debe cumplir la comunicación serial, aunque esta norma ha sufrido algunos cambios y revisiones se esencia es la misma.
Según la norma RS-232, un uno lógico será un voltaje comprendido entre –5 V y –10 V
Y un cero
lógico será un voltaje comprendido entre 5V y 10V, esto con el fin de aumentar
las distancias a la que los diferentes dispositivos se pueden comunicar
serialmente.
Se hace entonces indispensable contar con dispositivos
que puedan convertir niveles lógicos TTL
a niveles lógicos RS-232 y viceversa uno de los dispositivos mas utilizados
para este fin es el caballito de batalla MAX 232, sin embargo existen otros
dispositivos que no requieren 5 condensadores para su funcionamiento por
ejemplo el DS-275, etc...
El MAX 232:
Este dispositivo se muestra en la figura 4. lo
fabrican varias marcas, y su función no es otra que la de convertir niveles
lógicos TTL a niveles lógicos RS-232 y viceversa, para esto bastara con una
hojeada al datasheet y después de ubicar los condensadores y de polarizar
correctamente se obtiene un transformador de un solo canal para TTL a RS-232 y
otro canal RS-232 a TTL.
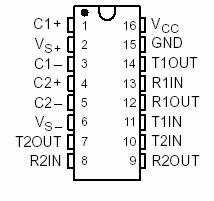
FIGURA 4. Max 232 de Texas instruments.
En la figura
anterior se aprecia su distribución de pines.
El modulo transmisor de datos y el receptor:
Se trata de una pareja de dispositivos de la marca
wemshing que permiten emitir y recibir señales de radiofrecuencia a una frecuencia
de 433 MHz, fija en el transmisor y ajustable en el receptor. El TX-433 y el
RWS-434 Trabajan en AM, el transmisor TX-433 se muestra en la figura 5. allí se aprecia que posee cuatro pines el
pin 1 es GND, el pin 2 es data, por allí llega la señal a ser transmitida, el
pin 3 es VCC y el pin 4 es ANT, en el pin cuatro se coloca una antena de
aproximadamente 15cm que consiste en un simple pedazo de alambre.

FIGURA 5. Transmisor de RF, TX – 433
Algunas características:
1-
frecuencia : 433MHz
2-
MODULACION : AM
3- RF output : 8mW
4- Alimentación: 1.5- 7 Vdc.
El receptor RWS-434 se muestra en la figura 6. allí se
aprecia que posee ocho pines y que su tamaño es reducido, no mayor al tamaño de
un pila AA. La asignación de los pines es como sigue:
- Gnd
- Out digital
- Out
- Vcc
- Vcc
- Gnd
- Gnd
- Ant
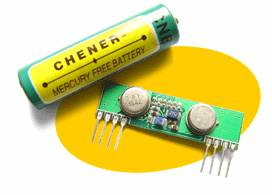
FIGURA 6. Receptor de RF, RWS-434
Algunas
características:
-
Alimentación: 3.5 a 6VDC
- Alcance: 140 metros al aire libre y hasta 30m en interiores.
- Alta frecuencia AM (303.92/315/418/433.92 MHZ)
- Rata de datos 4800 bps.
- Trabaja con el transmisor TX433
- Aplicaciones en sistemas inalámbricos de seguridad, alarmas para vehículos,
comunicación de datos, control remoto para puertas, etc.
La función en conjunto de esta pareja de dispositivos
es, en este trabajo, la de reemplazar el cable que une al microcontrolador, que
emite la señal a transmitir, con el MAX-232 que la recibe. Así un cero lógico
aplicado al pin DATA del transmisor será interpretado por el receptor y este
tomara un valor de voltaje x en sus pines de salida, y un uno lógico aplicado en el pin DATA del
transmisor será también interpretado por el receptor que fijara un valor de
voltaje x2 en sus terminales de salida, estos dos niveles de voltaje son
llevadas mediante un Op – Amp a modo de comparador, LM 339, a niveles lógicos
TTL antes de entregarse al MAX-232 y de esta forma cerrar el lazo de
comunicación.
La
digitalización de la señal:
La señal que entrega el receptor es analógica y corresponde a 2.2 V para un cero lógico en el Pin data del transmisor y a 2.4 V para un uno lógico en el pin data del transmisor, antes de enviarla al MAX 232 ha de transformarse en unos y ceros lógicos, a fin de poder trabajar con la lógica binaria. Esto se logra utilizando un op-amp como comparador, para este caso se hace uso del lm339N.
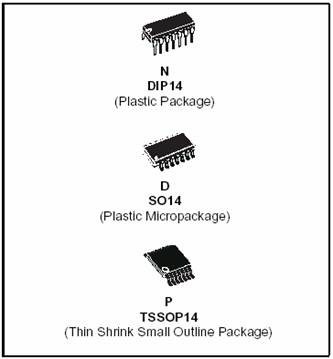 El lm339 se puede conseguir en cualquiera de los encapsulados de la
derecha, al igual que la mayoría de operacionales.
El lm339 se puede conseguir en cualquiera de los encapsulados de la
derecha, al igual que la mayoría de operacionales.
Cuanto menor sea su tamaño mayor será la dificultad para soldar los pines sin ayuda de una maquina especial, ¿y como no? su precio también aumenta, el mas comercial y practico es el DIP 14. Los dos encapsulados restantes se utilizan en circuitos de espacio reducido y especialmente para producción en serie.
Estos dispositivos constan de cuatro independientes y precisos comparadores de voltaje que detectan variaciones arriba de los 2 mV, y trabajan con alimentación común incluida la tierra. La corriente de alimentación Figura 7. Encapsulados del LM 339
que necesitan es realmente baja, poco mayor a 1.1 mA. Voltaje de alimentación puede ser hasta de 36V.
La distribución de pines del lm339N:
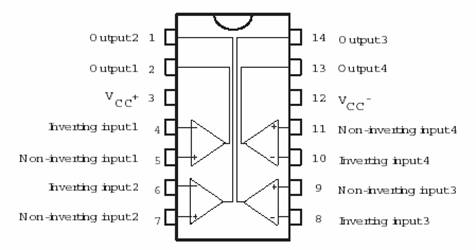
Figura 8.
Distribución de pines del LM 339.
La conexión en el circuito receptor es la de un comparador sencillo, como en la figura de abajo.
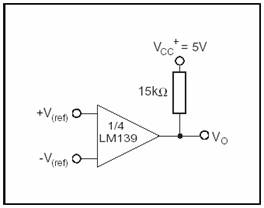
Figura 10.
Conexión como comparador de un Op-Amp
Así la señal análoga que envía el sensór se lleva al pin inversor y el pin no-inversor se alimenta con un voltaje de referencia fijado al cabo de muchos ensayos en 2.32V. El pin de salida se lleva a la entrada para niveles TTL del MAX 232 para ser llevada a niveles lógicos RS 232 que es lo que entiende el PC.
Los circuitos
de transmisión y de recepción:
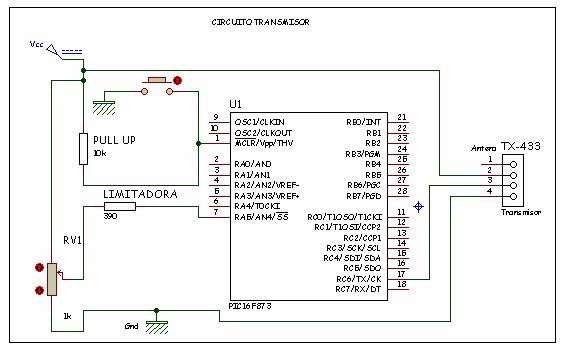
Figura 11.
Circuito Transmisor
En la figura 11. se aprecia que el micro
tiene una resistencia de pull up asociada a MCLR y su respectivo botón de reset
conectado a tierra, que al potenciómetro, el cual se usa para obtener una señal
analógica entre 0V y 5V, se ha añadido una resistencia en serie encargada de
limitar la corriente que llega al Ra5, que es el canal analógico empleado, se
ve también que los datos seriales son enviados por el RC6 del micro, a 1200
bps, al pin DATA del TX-433 el cual se encuentra debidamente
polarizado y por tanto son enviados mediante RF a el circuito receptor.
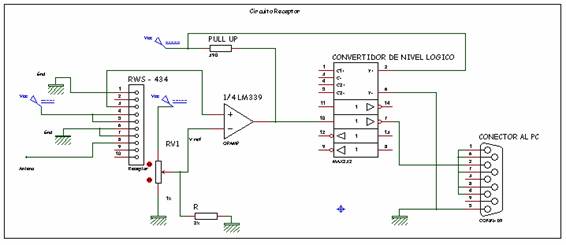
Figura 12. Circuito receptor
Para el circuito
receptor se han obviado los condensadores del MAX 232 a fin de descargar el
diagrama esquemático y concentrarse en lo que realmente importa. La señal llega
al receptor a través de la antena, luego es digitalizada con ayuda del LM 339,
después es llevada al
MAX 232 que es
el encargado de convertir los niveles lógicos TTL a RS – 232, para que puedan
ser leídos por el puerto serial del PC.
Descripción de los programas
en Assembler y en C++:
El programa en assembler es el que lleva el micro y su
funcionamiento se describe a continuación:
Convierte una señal analógica a digital con resolución
de 10-bits, por tanto necesita 2 byte para almacenar el resultado estos son
almacenados en 2 variables, genera un retardo de aproximadamente 150ms y envía
cinco bytes de modo serial al PC, en donde el primer byte es una constante, el
segundo byte es una variable, el tercer byte es nuevamente una constante, el
cuarto byte es una variable y el ultimo byte es una constante. Estas constantes
se utilizan para la validación de las parejas de bytes que llegan al PC en cada
trama de cinco bytes. Cuando termina de enviar los cinco bytes el micro realiza
una nueva conversión y repite el ciclo.
El programa en C++ es más interesante pues este es
capaz de reconocer cuando una pareja de bytes no corresponde realmente con el
resultado de una conversión y es capaz de sincronizarse automáticamente en muy
corto tiempo además es la interfaz que permite visualizar el resultado de la
conversión y lleva un conteo del numero de veces que ha sido interrumpida la
transmisión de datos por no estar sincronizada y por tanto no considerarse como
valida a una pareja de datos.
Los programas comentados del micro y de la interfaz en
C++ se adjuntan con este archivo.
Y son txrws.cpp y tserial873-01.asm
Con base en el material consultado para realizar el
trabajo, así como los datasheets de los dispositivos utilizados.
CONCLUSIONES
- La
comunicación en paralelo es más veloz que la comunicación serial, que por su
parte necesita menor cableado..
- Un
microcontrolador resulta muy conveniente a la hora de enviar datos
seriales pues cuenta con los módulos apropiados para dicha tarea desde su
fabricación.
- Un LM 339
Usado como comparador es capaz de conmutar a velocidades por lo menos
superiores a 1200bps.
- Se
comprobó el funcionamiento de la pareja de módulos transmisor y receptor a
un alcance de 15m.
BIBLIOGRAFIA
[1] TOCCI, Ronald. & WIDMER, Neal En: “Sistemas digitales”, Octava edición.
Ed. Prentice
Hall. México, 2003.
[2] http://www.microchip.com/support/datasheet/PIC16F873.pdf.
[3] http://www.qkits.com/serv/qkits/qkitscat/catalog.asp
[4] YESA, Susana En : “MICROCONTROLADORES ”
[5]
National Analog and Interface Products Databook. 2002 edition.
[6]
[7] http://antena.iespana.es/antena/teoriaweb/conceptos%20generales%201.html
[8] http://users.skynet.be/bk317494/datasheet/tx_rx434.pdf
[9] http:www.suconel.com\Radiofrecuencia
e IR\receptor rws 434.htm